Os sistemas eletrônicos de proteção de excesso de velocidade em turbinas (electronic overspeed protection) são amplamente utilizados em turbinas, sejam elas turbinas a gás ou turbinas a vapor. Esses sistemas desempenham um papel crucial na proteção das turbinas contra danos causados por operação em velocidades acima dos limites pré-estabelecidos.
Esses sistemas são projetados para monitorar continuamente a velocidade da turbina e tomar medidas de proteção caso a velocidade exceda um valor pré-determinado. Eles geralmente são compostos por sensores de velocidade, unidades de processamento eletrônico e relés de disparo.
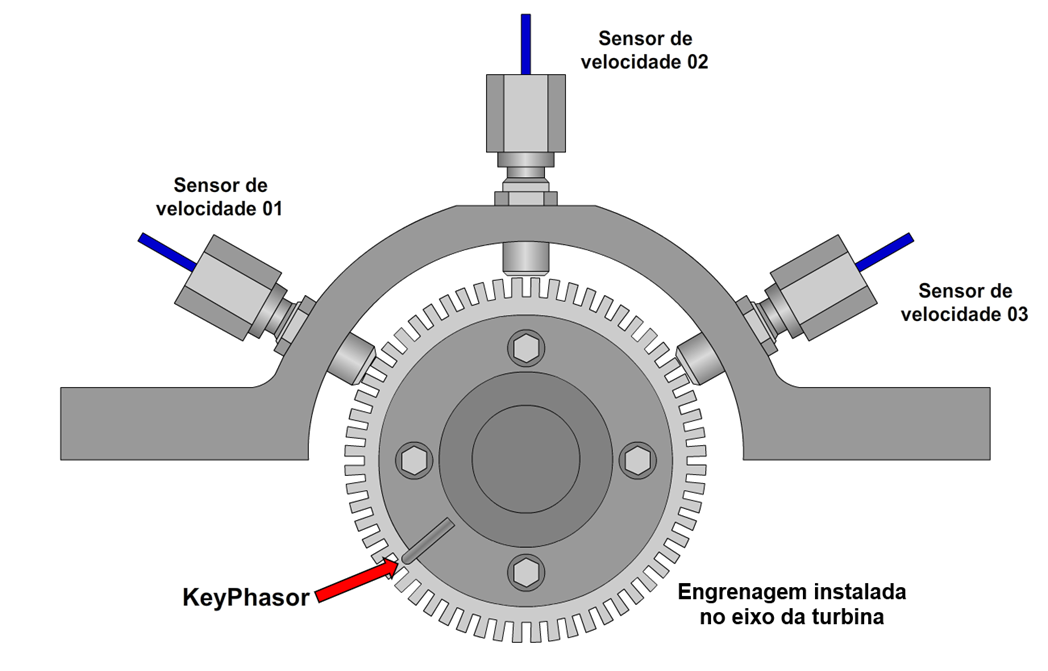
Os sensores de velocidade podem ser do tipo ativo ou passivo. Sensores ativos, como sensores de proximidade indutivos, emitem um sinal elétrico ou magnético que é interrompido pelos dentes de uma roda dentada ou engrenagem instalada no eixo da turbina. Já os sensores passivos, como sensores de efeito Hall, detectam a variação do campo magnético gerado pelos dentes da roda dentada. A seguir temos um esquema de instalação destes sensores em uma turbina.

Os sinais dos sensores são processados pelas unidades de processamento eletrônico, que calculam a velocidade da turbina com base na frequência dos sinais recebidos. Essas unidades também comparam a velocidade medida com um valor de limite pré-configurado para determinar se ocorreu um excesso de velocidade, geralmente este valor corresponde a 10% da velocidade nominal da turbina.
Caso a velocidade exceda o limite seguro, os relés de disparo são acionados para interromper o fornecimento de energia para a turbina, desligando-a e evitando danos. Esses relés de disparo podem ser controlados por lógica de votação, onde vários canais de detecção independentes são usados e os resultados são comparados para garantir uma detecção confiável.
Sistemas eletrônicos de detecção de excesso de velocidade com votação 2 de 3 são projetados para fornecer um nível mais elevado de confiabilidade na detecção de excesso de velocidade em turbinas e outros equipamentos rotativos. Esse tipo de sistema utiliza três circuitos de medição independentes para monitorar a velocidade e determinar se ocorreu um excesso de velocidade. Na figura abaixo pode-se observar um diagrama básico de uma lógica de TRIP utilizando 3 sensores de velocidade.

A votação 2 de 3 envolve a comparação dos resultados de medição dos três circuitos independentes. O sistema considera a maioria dos votos para tomar a decisão final. Se dois dos três circuitos indicarem um excesso de velocidade, o sistema ativará o disparo de proteção que deve ocorrer em no tempo máximo de 40 mS.
Esse método de votação é usado para aumentar a confiabilidade e reduzir a probabilidade de detecção incorreta de excesso de velocidade devido a falhas em um único circuito. Com três circuitos independentes, a detecção precisa de um excesso de velocidade é aprimorada.
Além da votação 2 de 3, esses sistemas geralmente incorporam outras medidas de segurança, como a detecção de falhas do circuito, verificação de integridade do sensor e diagnóstico de autoteste para garantir que o sistema esteja funcionando corretamente.
A norma API Std 670 estabelece os requisitos para sistemas de monitoramento e proteção de máquinas rotativas, incluindo a votação 2 de 3 para detecção de excesso de velocidade. Essa norma define os critérios e as diretrizes para o projeto, instalação, teste e operação desses sistemas.
Em resumo, os sistemas eletrônicos de detecção de excesso de velocidade com votação 2 de 3 oferecem maior confiabilidade na detecção de excesso de velocidade em turbinas e outros equipamentos rotativos, permitindo uma proteção eficaz contra danos causados por operação em velocidades acima do limite seguro.
Contato: Linkedin

Material de excelente qualidade. Muito bom,me ajuda muito nas dúvidas…operacionais.